2.第一阶段 车辆与物理环境
获取阿克曼模型
环境搭建
mkdir -p ~/liosam_ws/src
git clone -b ros2 https://github.com/robustify/audibot.git
sudo apt install ros-humble-example-interfaces
colcon build
source install/setup.bash打开gazebo测试例程
source /usr/share/gazebo/setup.sh #防止出现gazebo渲染断言报错
source install/setup.bash
#执行例程脚本
ros2 launch audibot_gazebo single_vehicle_example.launch.py#新开bash2
#转弯控制(实测几乎没效果)
ros2 topic pub -1 /audibot/steering_cmd std_msgs/msg/Float64 "{data: 0.5}"
#踩油门(可以观察到小车前进了)
ros2 topic pub -1 /audibot/throttle_cmd std_msgs/msg/Float64 "{data: 0.8}"
修改UDRF
添加激光雷达插件
装上 SLAM 必须的传感器
修改 /home/chuiyu/carplaning/liosam_ws/src/audibot/audibot_description/urdf/audibot.urdf.xacro 文件
完整文件修改为下面的代码:
<?xml version="1.0"?>
<robot name="audibot" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:property name="half_front_track_width" value="0.819" />
<xacro:property name="half_rear_track_width" value="0.8" />
<xacro:property name="half_wheelbase" value="1.326" />
<xacro:property name="wheel_radius" value="0.36" />
<xacro:property name="wheel_thickness" value="0.25" />
<xacro:property name="wheel_mass" value="40.0" />
<xacro:property name="body_mass" value="1620.0" />
<xacro:property name="body_width" value="${2*half_rear_track_width}" />
<xacro:property name="body_depth" value="${2*half_wheelbase + 0.8}" />
<xacro:property name="body_length" value="0.6" />
<xacro:arg name="pub_tf" default="true" />
<xacro:arg name="robot_name" default="" />
<xacro:arg name="blue" default="false" />
<gazebo>
<!-- Simulated vehicle interface -->
<plugin name="audibot_interface_plugin" filename="libaudibot_interface_plugin.so" >
<robot_name>$(arg robot_name)</robot_name>
<pub_tf>$(arg pub_tf)</pub_tf>
<tf_freq>100.0</tf_freq>
<ros>
<namespace>$(arg robot_name)</namespace>
</ros>
</plugin>
<!-- Publish current joint angles -->
<plugin name="joint_state_publisher" filename="libgazebo_ros_joint_state_publisher.so">
<joint_name>steer_fl_joint</joint_name>
<joint_name>steer_fr_joint</joint_name>
<joint_name>wheel_fl_joint</joint_name>
<joint_name>wheel_fr_joint</joint_name>
<joint_name>wheel_rl_joint</joint_name>
<joint_name>wheel_rr_joint</joint_name>
<update_rate>100</update_rate>
<ros>
<namespace>$(arg robot_name)</namespace>
</ros>
</plugin>
</gazebo>
<xacro:macro name="rear_wheel" params="name x y z flip" >
<link name="wheel_${name}" >
<visual>
<origin xyz="0 0 0" rpy="1.57079632679 ${flip * 3.1415926535} 0" />
<geometry>
<mesh filename="file://$(find audibot_description)/meshes/wheel.dae" scale="1 1 1" />
</geometry>
</visual>
<collision>
<geometry>
<cylinder radius="${wheel_radius}" length="${wheel_thickness}" />
</geometry>
</collision>
<inertial>
<origin xyz="0 0 0" rpy="0 0 0"/>
<mass value="${wheel_mass}"/>
<inertia ixx="${wheel_mass/12*(3*wheel_radius*wheel_radius + wheel_thickness*wheel_thickness)}" ixy="0" ixz="0" iyy="${wheel_mass/12*(3*wheel_radius*wheel_radius + wheel_thickness*wheel_thickness)}" iyz="0" izz="${wheel_mass/2 * wheel_radius*wheel_radius}"/>
</inertial>
</link>
<joint name="wheel_${name}_joint" type="continuous" >
<parent link="base_link" />
<child link="wheel_${name}" />
<origin xyz="${x} ${y} ${z}" rpy="-1.57079632679 0 0" />
<axis xyz="0 0 1" />
<limit effort="-1.0" velocity="-1.0" />
</joint>
</xacro:macro>
<xacro:macro name="front_wheel" params="name x y z flip" >
<link name="wheel_${name}" >
<visual>
<origin xyz="0 0 0" rpy="1.57079632679 ${flip * pi} 0" />
<geometry>
<mesh filename="file://$(find audibot_description)/meshes/wheel.dae" scale="1 1 1" />
</geometry>
</visual>
<collision>
<geometry>
<cylinder radius="${wheel_radius}" length="${wheel_thickness}" />
</geometry>
</collision>
<inertial>
<origin xyz="0 0 0" rpy="0 0 0"/>
<mass value="${wheel_mass}"/>
<inertia ixx="${wheel_mass/12*(3*wheel_radius*wheel_radius + wheel_thickness*wheel_thickness)}" ixy="0" ixz="0" iyy="${wheel_mass/12*(3*wheel_radius*wheel_radius + wheel_thickness*wheel_thickness)}" iyz="0" izz="${wheel_mass/2 * wheel_radius*wheel_radius}"/>
</inertial>
</link>
<link name="steer_${name}" >
<inertial>
<origin xyz="-0.013054 -0.0295 0" rpy="0 0 0"/>
<mass value="20.0"/>
<inertia ixx="2" ixy="0" ixz="0" iyy="2" iyz="0" izz="2"/>
</inertial>
</link>
<joint name="steer_${name}_joint" type="revolute" >
<parent link="base_link" />
<child link="steer_${name}" />
<origin xyz="${x} ${y} ${z}" rpy="0 0 0" />
<axis xyz="0 0 1" />
<limit upper="0.6" lower="-0.6" effort="-1.0" velocity="-1.0" />
</joint>
<joint name="wheel_${name}_joint" type="continuous" >
<parent link="steer_${name}" />
<child link="wheel_${name}" />
<origin xyz="0 0 0" rpy="-1.57079632679 0 0" />
<axis xyz="0 0 1" />
<limit effort="-1.0" velocity="-1.0" />
</joint>
</xacro:macro>
<link name="base_footprint">
</link>
<link name="base_link">
<visual>
<origin xyz="0.035 0 0.025" rpy="0 0 0" />
<geometry>
<xacro:if value="$(arg blue)" >
<mesh filename="file://$(find audibot_description)/meshes/blue_body.dae" scale="1 1 1" />
</xacro:if>
<xacro:unless value="$(arg blue)" >
<mesh filename="file://$(find audibot_description)/meshes/orange_body.dae" scale="1 1 1" />
</xacro:unless>
</geometry>
</visual>
<collision>
<origin xyz="0.035 0 0.025" rpy="0 0 0" />
<geometry>
<mesh filename="file://$(find audibot_description)/meshes/body_collision.stl" scale="1 1 1" />
</geometry>
</collision>
<inertial>
<origin xyz="0 0 0" rpy="0 0 0"/>
<mass value="${body_mass}"/>
<inertia ixx="${body_mass/12 * (body_width*body_width + body_length*body_length)}" ixy="0" ixz="0" iyy="${body_mass/12 * (body_length*body_length + body_depth*body_depth)}" iyz="0" izz="${body_mass/12 * (body_width*body_width + body_depth*body_depth)}"/>
</inertial>
</link>
<joint name="base_link_joint" type="fixed">
<origin xyz="${half_wheelbase} 0 ${wheel_radius}" rpy="0 0 0"/>
<parent link="base_footprint"/>
<child link="base_link"/>
</joint>
<xacro:rear_wheel name="rl" x="${-half_wheelbase}" y="${half_rear_track_width}" z="0" flip="1" />
<xacro:rear_wheel name="rr" x="${-half_wheelbase}" y="${-half_rear_track_width}" z="0" flip="0" />
<xacro:front_wheel name="fl" x="${half_wheelbase}" y="${half_front_track_width}" z="0" flip="1" />
<xacro:front_wheel name="fr" x="${half_wheelbase}" y="${-half_front_track_width}" z="0" flip="0" />
<xacro:property name="wheel_friction" value="1.75" />
<gazebo reference="base_link" >
<mu1>0.5</mu1>
<mu2>0.5</mu2>
</gazebo>
<gazebo reference="wheel_fl" >
<mu1>${wheel_friction}</mu1>
<mu2>${wheel_friction}</mu2>
</gazebo>
<gazebo reference="wheel_fr" >
<mu1>${wheel_friction}</mu1>
<mu2>${wheel_friction}</mu2>
</gazebo>
<gazebo reference="wheel_rl" >
<mu1>${wheel_friction}</mu1>
<mu2>${wheel_friction}</mu2>
</gazebo>
<gazebo reference="wheel_rr" >
<mu1>${wheel_friction}</mu1>
<mu2>${wheel_friction}</mu2>
</gazebo>
<!-- 自定义雷达link -->
<link name="lidar_link">
<inertial>
<mass value="0.1" />
<origin xyz="0 0 0" />
<inertia ixx="0.01" ixy="0.0" ixz="0.0" iyy="0.01" iyz="0.0" izz="0.01" />
</inertial>
<visual>
<geometry><cylinder radius="0.05" length="0.07"/></geometry>
<material name="black"><color rgba="0 0 0 1"/></material>
</visual>
<collision>
<geometry><cylinder radius="0.05" length="0.07"/></geometry>
</collision>
</link>
<joint name="lidar_joint" type="fixed">
<parent link="base_link"/>
<child link="lidar_link"/>
<origin xyz="1.2 0 1.4" rpy="0 0 0"/>
</joint>
<link name="imu_link">
<inertial>
<mass value="0.01" />
<inertia ixx="0.001" ixy="0" ixz="0" iyy="0.001" iyz="0" izz="0.001" />
</inertial>
</link>
<joint name="imu_joint" type="fixed">
<parent link="base_link"/>
<child link="imu_link"/>
<origin xyz="0 0 0" rpy="0 0 0"/>
</joint>
<gazebo reference="lidar_link">
<sensor name="lidar" type="ray">
<always_on>true</always_on>
<!-- 关闭激光线特效 -->
<visualize>false</visualize>
<update_rate>10</update_rate>
<ray>
<scan>
<horizontal>
<samples>1800</samples>
<min_angle>-3.1415926</min_angle>
<max_angle>3.1415926</max_angle>
</horizontal>
<vertical>
<samples>32</samples>
<min_angle>-0.26</min_angle>
<max_angle>0.26</max_angle>
</vertical>
</scan>
<range>
<min>0.3</min>
<max>100.0</max>
</range>
</ray>
<plugin name="lidar_plugin" filename="libgazebo_ros_ray_sensor.so">
<ros>
<remapping>~/out:=/points_raw</remapping>
</ros>
<output_type>sensor_msgs/PointCloud2</output_type>
<frame_name>lidar_link</frame_name>
</plugin>
</sensor>
</gazebo>
<gazebo reference="imu_link">
<plugin name="imu_plugin" filename="libgazebo_ros_imu_sensor.so">
<ros>
<frame_name>imu_link</frame_name>
<remapping>~/out:=/imu_raw</remapping>
</ros>
</plugin>
</gazebo>
</robot>编译测试
colcon build
source install/setup.bash
ros2 launch audibot_gazebo single_vehicle_example.launch.py#新开bash2
#查看是否有雷达数据输出
ros2 topic hz /points_raw
^Cchuiyu@chuiyu:~$ ros2 topic hz /points_raw
average rate: 6.219
min: 0.157s max: 0.168s std dev: 0.00335s window: 8
average rate: 6.139
min: 0.157s max: 0.175s std dev: 0.00484s window: 15
average rate: 6.093
min: 0.157s max: 0.178s std dev: 0.00558s window: 21
average rate: 6.068
min: 0.153s max: 0.185s std dev: 0.00683s window: 27
average rate: 6.055
min: 0.153s max: 0.185s std dev: 0.00738s window: 33
average rate: 6.036
min: 0.153s max: 0.194s std dev: 0.00832s window: 39
average rate: 6.018
min: 0.153s max: 0.194s std dev: 0.00800s window: 45
average rate: 6.031
min: 0.153s max: 0.194s std dev: 0.00771s window: 52
average rate: 6.039
min: 0.153s max: 0.194s std dev: 0.00748s window: 59
average rate: 6.050
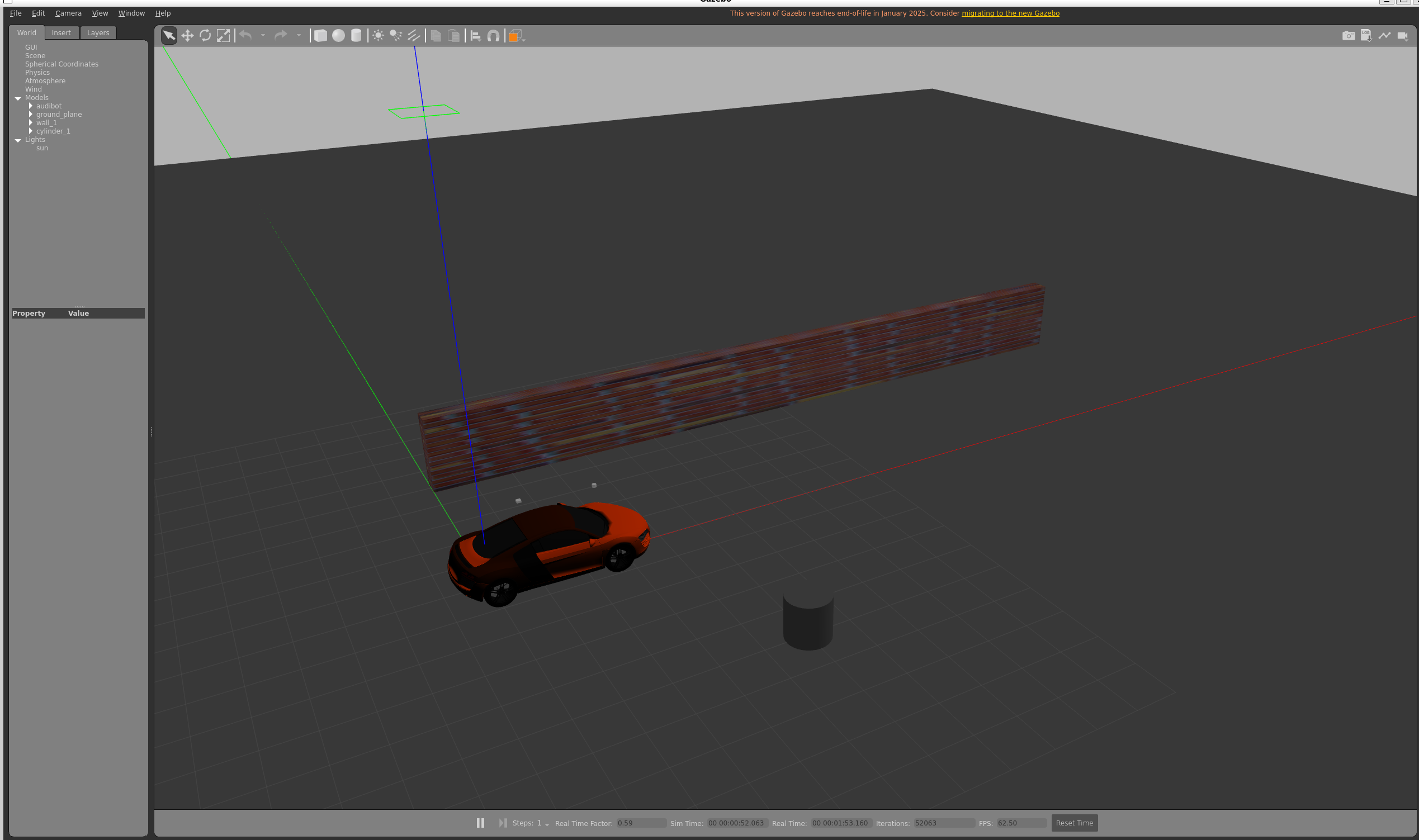
min: 0.153s max: 0.194s std dev: 0.00725s window: 66观看gazebo当中有一个激光雷达 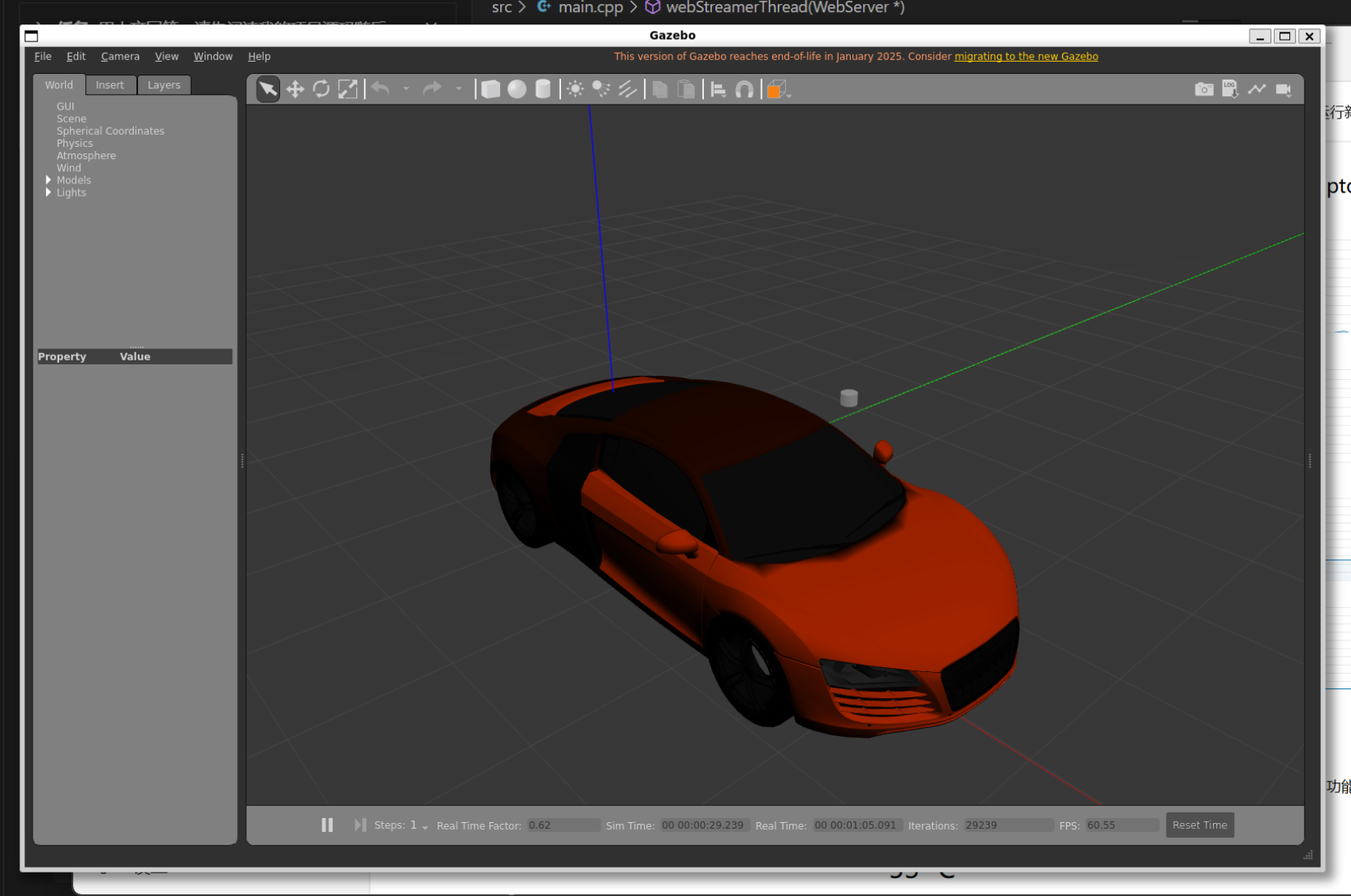
添加GPS插件
同样的修改: /home/chuiyu/carplaning/liosam_ws/src/audibot/audibot_description/urdf/audibot.urdf.xacro
<link name="gps_link">
<inertial>
<mass value="0.01" />
<inertia ixx="0.001" ixy="0" ixz="0" iyy="0.001" iyz="0" izz="0.001" />
</inertial>
<visual>
<geometry><box size="0.1 0.1 0.05"/></geometry>
<material name="white"><color rgba="1 1 1 1"/></material>
</visual>
</link>
<joint name="gps_joint" type="fixed">
<parent link="base_link"/>
<child link="gps_link"/>
<origin xyz="-0.5 0 1.5" rpy="0 0 0"/>
</joint>
<gazebo reference="gps_link">
<sensor name="gps_sensor" type="gps">
<always_on>true</always_on>
<update_rate>10.0</update_rate>
<plugin name="gps_controller" filename="libgazebo_ros_gps_sensor.so">
<ros>
<remapping>~/out:=/gps/fix</remapping>
</ros>
<frame_name>gps_link</frame_name>
<referenceLatitude>1.3521</referenceLatitude>
<referenceLongitude>103.8198</referenceLongitude>
<referenceHeading>0</referenceHeading>
<referenceAltitude>10</referenceAltitude>
<offset>0 0 0</offset>
<drift>0.0001 0.0001 0.0001</drift>
<gaussianNoise>0.0001 0.0001 0.0001</gaussianNoise>
<velocityDrift>0 0 0</velocityDrift>
<velocityGaussianNoise>0.0001 0.0001 0.0001</velocityGaussianNoise>
</plugin>
</sensor>
</gazebo>修改了 URDF 文件后,必须重新编译才能生效,否则 Gazebo 加载的还是旧模型。
cd ~/liosam_ws
colcon build --symlink-install
source install/setup.bash还是用之前的命令把车拉起来:
ros2 launch audibot_gazebo single_vehicle_example.launch.py检查话题是否存在:
ros2 topic list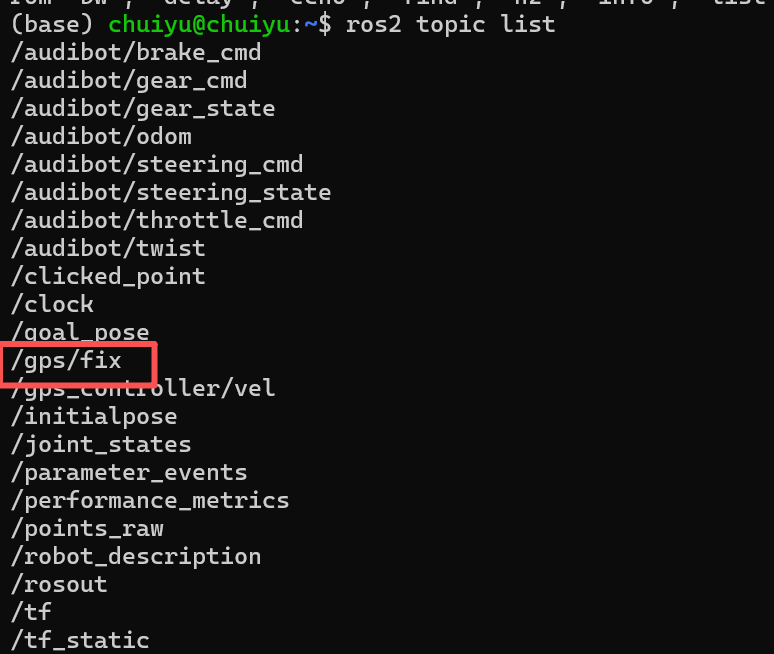
预期结果:列表中应该出现 /gps/fix。
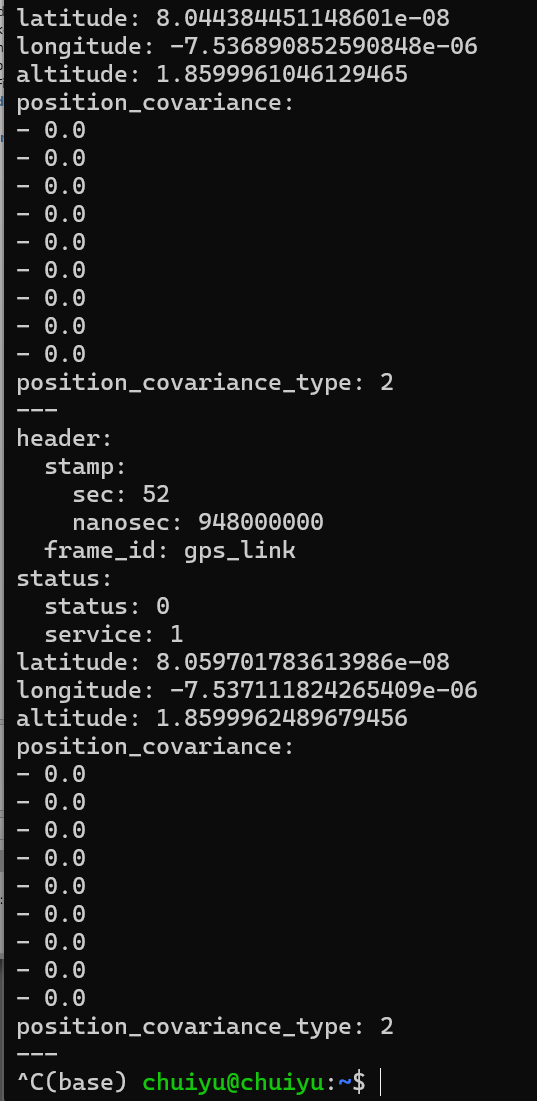
检查是否有数据输出:
ros2 topic echo /gps/fix预期结果: 你应该看到类似下面的数据不断刷屏:
latitude: 1.3521... (我们在代码里设的新加坡纬度)longitude: 103.8198... (新加坡经度)altitude: 10.0...关键点:看
position_covariance,这 9 个数应该非常小(比如 1e-08 级别),这代表你要的 RTK 高精度 模拟成功了。
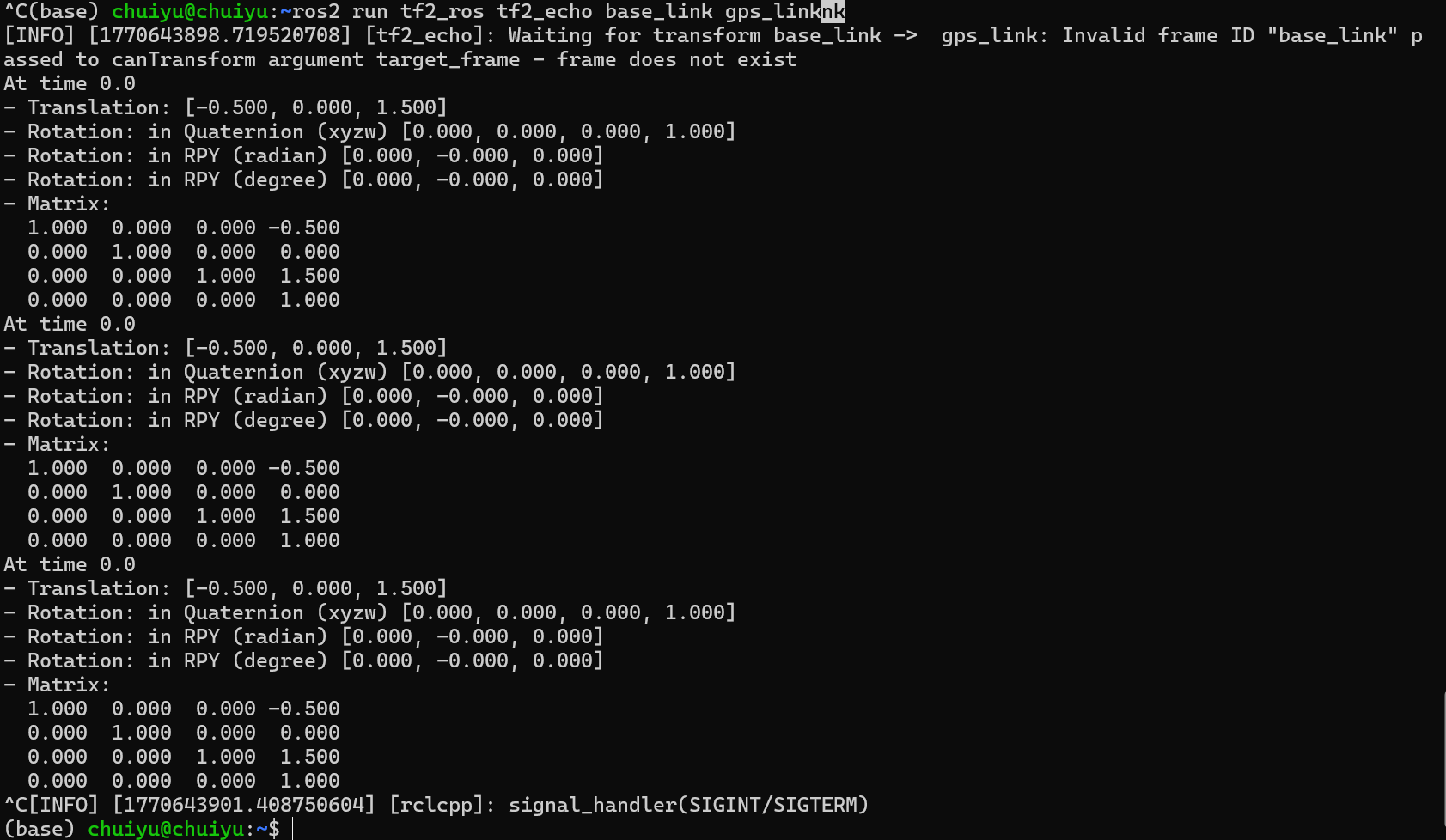
检查 TF 变换 (LIO-SAM 必需): LIO-SAM 需要知道 GPS 天线相对于车体中心的具体位置。
ros2 run tf2_ros tf2_echo base_link gps_link预期结果: 应该显示 At time ...,然后是 Translation: [-0.500, 0.000, 1.500] (这就是我们在 XML 里写的 origin xyz)。
创建世界环境
cd /home/chuiyu/carplaning/liosam_ws/src/audibot/audibot_gazebo
mkdir worlds
cd worlds
touch slam_test.world
code .<?xml version="1.0" ?>
<sdf version="1.6">
<world name="default">
<!-- Gazebo ROS 插件 -->
<plugin name="gazebo_ros_state" filename="libgazebo_ros_state.so">
<ros>
<namespace>/</namespace>
</ros>
<update_rate>10.0</update_rate>
</plugin>
<!-- 光照 -->
<light name='sun' type='directional'>
<cast_shadows>1</cast_shadows>
<pose>0 0 10 0 -0 0</pose>
<diffuse>0.8 0.8 0.8 1</diffuse>
<specular>0.2 0.2 0.2 1</specular>
<attenuation>
<range>1000</range>
<constant>0.9</constant>
<linear>0.01</linear>
<quadratic>0.001</quadratic>
</attenuation>
<direction>-0.5 0.1 -0.9</direction>
</light>
<!-- 地面 -->
<model name='ground_plane'>
<static>1</static>
<link name='link'>
<collision name='collision'>
<geometry>
<plane>
<normal>0 0 1</normal>
<size>100 100</size>
</plane>
</geometry>
<surface>
<friction>
<ode>
<mu>100</mu>
<mu2>50</mu2>
</ode>
</friction>
</surface>
</collision>
<visual name='visual'>
<cast_shadows>0</cast_shadows>
<geometry>
<plane>
<normal>0 0 1</normal>
<size>100 100</size>
</plane>
</geometry>
<material>
<script>
<uri>file://media/materials/scripts/gazebo.material</uri>
<name>Gazebo/Grey</name>
</script>
</material>
</visual>
</link>
</model>
<!-- 物理引擎设置 -->
<physics type="ode">
<max_step_size>0.001</max_step_size>
<real_time_factor>1</real_time_factor>
<real_time_update_rate>1000</real_time_update_rate>
</physics>
<!-- ========== 外围墙体 ========== -->
<!-- 北墙 -->
<model name='wall_north'>
<static>true</static>
<pose>0 20 1.5 0 0 0</pose>
<link name='link'>
<collision name='collision'>
<geometry><box><size>40 0.5 3</size></box></geometry>
</collision>
<visual name='visual'>
<geometry><box><size>40 0.5 3</size></box></geometry>
<material><script><uri>file://media/materials/scripts/gazebo.material</uri><name>Gazebo/Bricks</name></script></material>
</visual>
</link>
</model>
<!-- 南墙 -->
<model name='wall_south'>
<static>true</static>
<pose>0 -20 1.5 0 0 0</pose>
<link name='link'>
<collision name='collision'>
<geometry><box><size>40 0.5 3</size></box></geometry>
</collision>
<visual name='visual'>
<geometry><box><size>40 0.5 3</size></box></geometry>
<material><script><uri>file://media/materials/scripts/gazebo.material</uri><name>Gazebo/Bricks</name></script></material>
</visual>
</link>
</model>
<!-- 东墙 -->
<model name='wall_east'>
<static>true</static>
<pose>20 0 1.5 0 0 0</pose>
<link name='link'>
<collision name='collision'>
<geometry><box><size>0.5 40 3</size></box></geometry>
</collision>
<visual name='visual'>
<geometry><box><size>0.5 40 3</size></box></geometry>
<material><script><uri>file://media/materials/scripts/gazebo.material</uri><name>Gazebo/Bricks</name></script></material>
</visual>
</link>
</model>
<!-- 西墙 -->
<model name='wall_west'>
<static>true</static>
<pose>-20 0 1.5 0 0 0</pose>
<link name='link'>
<collision name='collision'>
<geometry><box><size>0.5 40 3</size></box></geometry>
</collision>
<visual name='visual'>
<geometry><box><size>0.5 40 3</size></box></geometry>
<material><script><uri>file://media/materials/scripts/gazebo.material</uri><name>Gazebo/Bricks</name></script></material>
</visual>
</link>
</model>
<!-- ========== 内部房间分隔墙 ========== -->
<!-- 中央走廊左墙 -->
<model name='corridor_wall_left'>
<static>true</static>
<pose>-5 0 1.5 0 0 0</pose>
<link name='link'>
<collision name='collision'>
<geometry><box><size>0.3 30 3</size></box></geometry>
</collision>
<visual name='visual'>
<geometry><box><size>0.3 30 3</size></box></geometry>
<material><script><uri>file://media/materials/scripts/gazebo.material</uri><name>Gazebo/Wood</name></script></material>
</visual>
</link>
</model>
<!-- 中央走廊右墙 -->
<model name='corridor_wall_right'>
<static>true</static>
<pose>5 0 1.5 0 0 0</pose>
<link name='link'>
<collision name='collision'>
<geometry><box><size>0.3 30 3</size></box></geometry>
</collision>
<visual name='visual'>
<geometry><box><size>0.3 30 3</size></box></geometry>
<material><script><uri>file://media/materials/scripts/gazebo.material</uri><name>Gazebo/Wood</name></script></material>
</visual>
</link>
</model>
<!-- 横向分隔墙1 -->
<model name='divider_wall_1'>
<static>true</static>
<pose>-12.5 10 1.5 0 0 0</pose>
<link name='link'>
<collision name='collision'>
<geometry><box><size>15 0.3 3</size></box></geometry>
</collision>
<visual name='visual'>
<geometry><box><size>15 0.3 3</size></box></geometry>
<material><script><uri>file://media/materials/scripts/gazebo.material</uri><name>Gazebo/Wood</name></script></material>
</visual>
</link>
</model>
<!-- 横向分隔墙2 -->
<model name='divider_wall_2'>
<static>true</static>
<pose>12.5 -10 1.5 0 0 0</pose>
<link name='link'>
<collision name='collision'>
<geometry><box><size>15 0.3 3</size></box></geometry>
</collision>
<visual name='visual'>
<geometry><box><size>15 0.3 3</size></box></geometry>
<material><script><uri>file://media/materials/scripts/gazebo.material</uri><name>Gazebo/Wood</name></script></material>
</visual>
</link>
</model>
<!-- ========== 圆柱障碍物 ========== -->
<model name='cylinder_1'>
<static>true</static>
<pose>-10 15 1 0 0 0</pose>
<link name='link'>
<collision name='collision'>
<geometry><cylinder><radius>0.5</radius><length>2</length></cylinder></geometry>
</collision>
<visual name='visual'>
<geometry><cylinder><radius>0.5</radius><length>2</length></cylinder></geometry>
<material><script><name>Gazebo/Red</name></script></material>
</visual>
</link>
</model>
<model name='cylinder_2'>
<static>true</static>
<pose>10 15 1 0 0 0</pose>
<link name='link'>
<collision name='collision'>
<geometry><cylinder><radius>0.5</radius><length>2</length></cylinder></geometry>
</collision>
<visual name='visual'>
<geometry><cylinder><radius>0.5</radius><length>2</length></cylinder></geometry>
<material><script><name>Gazebo/Blue</name></script></material>
</visual>
</link>
</model>
<model name='cylinder_3'>
<static>true</static>
<pose>-10 -15 1 0 0 0</pose>
<link name='link'>
<collision name='collision'>
<geometry><cylinder><radius>0.5</radius><length>2</length></cylinder></geometry>
</collision>
<visual name='visual'>
<geometry><cylinder><radius>0.5</radius><length>2</length></cylinder></geometry>
<material><script><name>Gazebo/Green</name></script></material>
</visual>
</link>
</model>
<model name='cylinder_4'>
<static>true</static>
<pose>10 -15 1 0 0 0</pose>
<link name='link'>
<collision name='collision'>
<geometry><cylinder><radius>0.5</radius><length>2</length></cylinder></geometry>
</collision>
<visual name='visual'>
<geometry><cylinder><radius>0.5</radius><length>2</length></cylinder></geometry>
<material><script><name>Gazebo/Yellow</name></script></material>
</visual>
</link>
</model>
<!-- ========== 方形箱子障碍物 ========== -->
<model name='box_1'>
<static>true</static>
<pose>-15 5 0.5 0 0 0.5</pose>
<link name='link'>
<collision name='collision'>
<geometry><box><size>1 1 1</size></box></geometry>
</collision>
<visual name='visual'>
<geometry><box><size>1 1 1</size></box></geometry>
<material><script><uri>file://media/materials/scripts/gazebo.material</uri><name>Gazebo/WoodPallet</name></script></material>
</visual>
</link>
</model>
<model name='box_2'>
<static>true</static>
<pose>15 5 0.75 0 0 -0.3</pose>
<link name='link'>
<collision name='collision'>
<geometry><box><size>1.5 1.5 1.5</size></box></geometry>
</collision>
<visual name='visual'>
<geometry><box><size>1.5 1.5 1.5</size></box></geometry>
<material><script><uri>file://media/materials/scripts/gazebo.material</uri><name>Gazebo/WoodPallet</name></script></material>
</visual>
</link>
</model>
<model name='box_3'>
<static>true</static>
<pose>-15 -5 0.6 0 0 0.8</pose>
<link name='link'>
<collision name='collision'>
<geometry><box><size>1.2 1.2 1.2</size></box></geometry>
</collision>
<visual name='visual'>
<geometry><box><size>1.2 1.2 1.2</size></box></geometry>
<material><script><uri>file://media/materials/scripts/gazebo.material</uri><name>Gazebo/WoodPallet</name></script></material>
</visual>
</link>
</model>
<model name='box_4'>
<static>true</static>
<pose>15 -5 0.4 0 0 -0.6</pose>
<link name='link'>
<collision name='collision'>
<geometry><box><size>0.8 0.8 0.8</size></box></geometry>
</collision>
<visual name='visual'>
<geometry><box><size>0.8 0.8 0.8</size></box></geometry>
<material><script><uri>file://media/materials/scripts/gazebo.material</uri><name>Gazebo/WoodPallet</name></script></material>
</visual>
</link>
</model>
<!-- 走廊中的小障碍物 -->
<model name='obstacle_small_1'>
<static>true</static>
<pose>0 8 0.3 0 0 0</pose>
<link name='link'>
<collision name='collision'>
<geometry><box><size>0.6 0.6 0.6</size></box></geometry>
</collision>
<visual name='visual'>
<geometry><box><size>0.6 0.6 0.6</size></box></geometry>
<material><script><uri>file://media/materials/scripts/gazebo.material</uri><name>Gazebo/Orange</name></script></material>
</visual>
</link>
</model>
<model name='obstacle_small_2'>
<static>true</static>
<pose>0 -8 0.3 0 0 0</pose>
<link name='link'>
<collision name='collision'>
<geometry><box><size>0.6 0.6 0.6</size></box></geometry>
</collision>
<visual name='visual'>
<geometry><box><size>0.6 0.6 0.6</size></box></geometry>
<material><script><uri>file://media/materials/scripts/gazebo.material</uri><name>Gazebo/Orange</name></script></material>
</visual>
</link>
</model>
<!-- ========== 高度变化的平台 ========== -->
<model name='platform_1'>
<static>true</static>
<pose>-12 -12 0.15 0 0 0</pose>
<link name='link'>
<collision name='collision'>
<geometry><box><size>4 4 0.3</size></box></geometry>
</collision>
<visual name='visual'>
<geometry><box><size>4 4 0.3</size></box></geometry>
<material><script><uri>file://media/materials/scripts/gazebo.material</uri><name>Gazebo/Grey</name></script></material>
</visual>
</link>
</model>
<model name='platform_2'>
<static>true</static>
<pose>12 12 0.25 0 0 0</pose>
<link name='link'>
<collision name='collision'>
<geometry><box><size>5 5 0.5</size></box></geometry>
</collision>
<visual name='visual'>
<geometry><box><size>5 5 0.5</size></box></geometry>
<material><script><uri>file://media/materials/scripts/gazebo.material</uri><name>Gazebo/Grey</name></script></material>
</visual>
</link>
</model>
<!-- ========== L型墙角 ========== -->
<model name='corner_wall_1'>
<static>true</static>
<pose>-8 -8 1 0 0 0</pose>
<link name='link'>
<collision name='collision'>
<geometry><box><size>0.3 4 2</size></box></geometry>
</collision>
<visual name='visual'>
<geometry><box><size>0.3 4 2</size></box></geometry>
<material><script><uri>file://media/materials/scripts/gazebo.material</uri><name>Gazebo/CeilingTiled</name></script></material>
</visual>
</link>
</model>
<model name='corner_wall_2'>
<static>true</static>
<pose>-6 -10 1 0 0 0</pose>
<link name='link'>
<collision name='collision'>
<geometry><box><size>4 0.3 2</size></box></geometry>
</collision>
<visual name='visual'>
<geometry><box><size>4 0.3 2</size></box></geometry>
<material><script><uri>file://media/materials/scripts/gazebo.material</uri><name>Gazebo/CeilingTiled</name></script></material>
</visual>
</link>
</model>
</world>
</sdf>cd /home/chuiyu/carplaning/liosam_ws/src/audibot/audibot_gazebo/
cd launch
touch slam_sim.launch.py
code .import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch_ros.actions import Node
import xacro
def generate_launch_description():
pkg_audibot_gazebo = get_package_share_directory('audibot_gazebo')
pkg_audibot_description = get_package_share_directory('audibot_description')
pkg_gazebo_ros = get_package_share_directory('gazebo_ros')
# 1. 设置世界文件路径
world_file_name = 'slam_test.world'
world_path = os.path.join(pkg_audibot_gazebo, 'worlds', world_file_name)
# 2. 解析 URDF
xacro_file = os.path.join(pkg_audibot_description, 'urdf', 'audibot.urdf.xacro')
doc = xacro.process_file(xacro_file)
robot_desc = doc.toxml()
# 3. 使用 gazebo.launch.py 启动完整的 Gazebo(包含server和client)
gazebo = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(pkg_gazebo_ros, 'launch', 'gazebo.launch.py')
),
launch_arguments={
'world': world_path,
'verbose': 'true'
}.items(),
)
# 4. Robot State Publisher 节点
robot_state_publisher = Node(
package='robot_state_publisher',
executable='robot_state_publisher',
name='robot_state_publisher',
output='screen',
parameters=[{
'use_sim_time': True,
'robot_description': robot_desc
}]
)
# 5. Spawn Robot
spawn_robot = Node(
package='gazebo_ros',
executable='spawn_entity.py',
arguments=[
'-topic', 'robot_description',
'-entity', 'audibot',
'-x', '0', '-y', '0', '-z', '0.5'
],
output='screen'
)
return LaunchDescription([
gazebo,
robot_state_publisher,
spawn_robot
])编译并运行
因为我们添加了新文件,虽然理论上 Python 脚本不需要编译,但为了让 ROS 2 的索引系统(ament_index)找到新添加的 worlds 文件夹,最好重新编译一次。
cd /home/chuiyu/carplaning/liosam_ws
colcon build --symlink-install
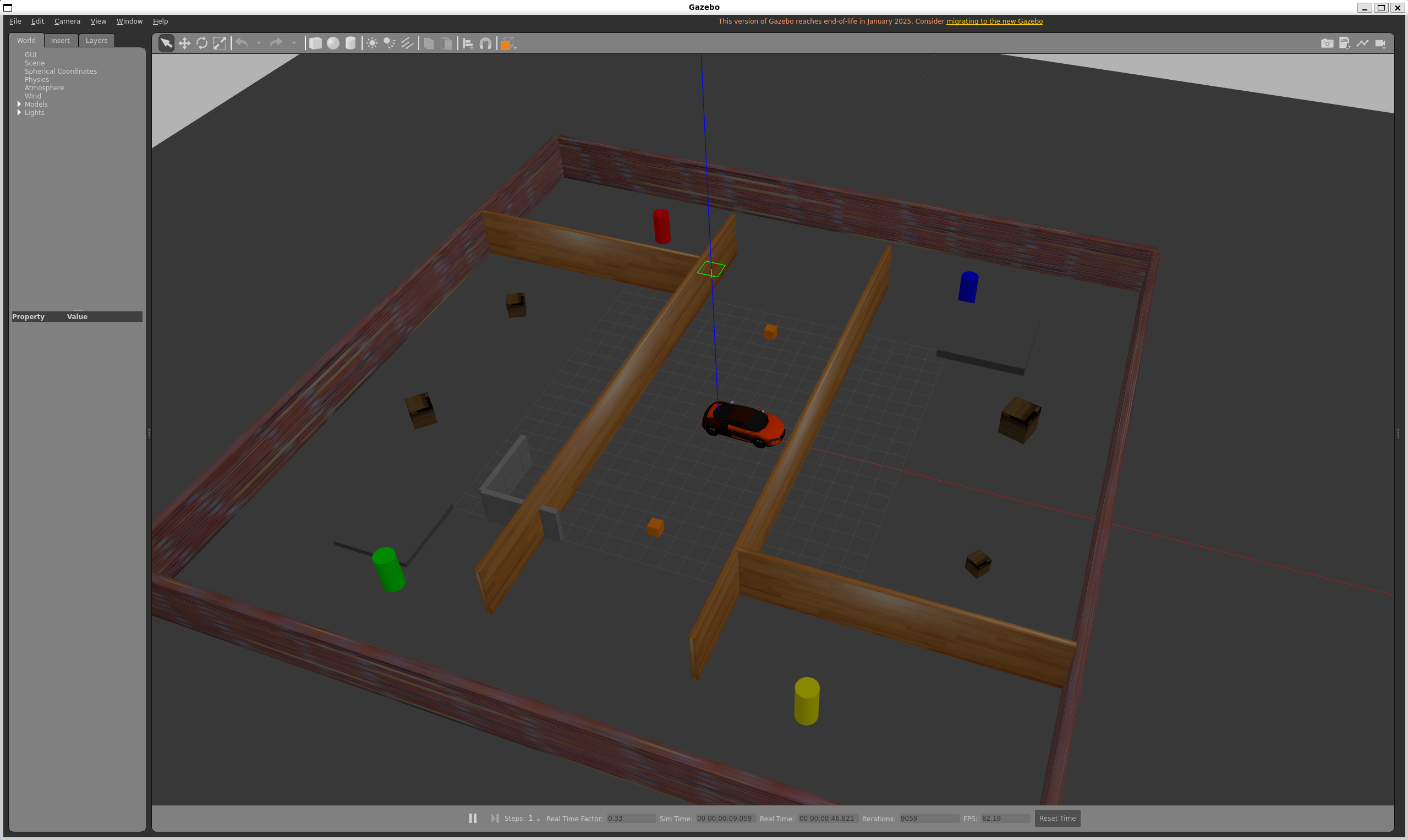
source install/setup.bash验收标准 Gazebo 启动后,你应该能看到:
Audibot 小车 停在中间。
四周有 砖墙。
附近有灰色的 圆柱体。
车顶有你之前加的 白色 GPS 盒子 和 黑色圆柱 LiDAR。